 |
ブロック図に示す通り、ジョイスティックの出力(アナログ電圧)をHandshake上でAD変換しパソコン(ここでは東芝製Libretto70)に取り込む。
その値に応じて、PWM(Pulse Width Mudulation)のデューティを設定しモータをまわす。左右・上下移動用モータにはエンコーダがついており、回転速度を監視し、速度制御をかけている。左右移動機構の上下についているモータに対して同じ速度を指令させることにより、ハンドのスムーズな左右移動を実現している。 なお、A/Dコンバータ・PWMジェネレータ・エンコーダカウンタにはこれらの機能をワンチップで実現するHITACHIのHD63140(UPP:Universal Pulse Processor)を2つ用いている。 |
 |
 |
 |
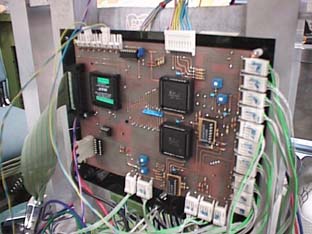
UPPを2つ使うにあたって、ポート数が足りないためレジスタ等を大量に設ける必要があり、当初は74シリーズを大量に用いて、9月にRev1.0のボードを作成。
しかし、接触不良から動作不安定になることがあり、リビジョンアップを決意。新たに両面プリント基板で焼くことにする。さらに、おりしも研究用にAlteraのMAX+Plus IIが研究室に導入された頃であったので、74シリーズを全廃してPLD(Programmable Logic Device)に置き換えることとなる。この基板が完成したのは、NHKが取材にくる数日前。ボードの仕様は、変更していなかったのでプログラムの修正もなくめでたく動作。 はれて、Rev2.0に! (もっとも、動作チェックの段階でいくつか問題はでたんですけど・・・) |