下条・明研究室
ハイパーダイナミックマニピュレータ
スポーツなどにおける人間のダイナミック動作は非常に高度な動作であり,多くの運動制御技能を必要とする.しかし人間動作の運動解析についての研究は数多くあるが,運動を実現するための制御についての研究が少ない.また,人間動作における
- 脳などの制御メカニズムの複雑さ
- 自由度が多いこと
- 個体差
- 人体の運動と力の計測困難
などが人間動作の制御アルゴリズムの解明を妨げている.
一方,ロボットの理想像は人間型ロボットである.最近,ヒューマノイドに関する本格的な研究は始まっているが,人間全身の自由度の動的な協調制御を考慮した研究がまだ多く見られていない.
そこで,本研究は人間の動的な協調制御問題を取上げて,スポーツ動作を中心に人間のダイナミック動作における運動制御技能を解析し,それを実現するための新しいロボットの機構と制御法を研究し,ロボットによる実現を目指す.また,応用の分野として,ヒューマノイドだけではなく,スポーツ用具の試験用ロボットなど工学の実用的な分野を幅広く考える.
干渉駆動による多段加速
下の図のような自由端で接合された2リンクを考え,
- リンク1を把持し,両リンクを加速
- リンク1を急停止させると,
- 慣性力などにより,リンク2が急加速される
という現象が起こります.この例のように,リンク1,2を干渉する(協力し合う)ように駆動させることにより,アクチュエータのないリンク2の段階的な急加速が可能となります.人間は,この干渉駆動による多段加速を積極的に利用し,力の強い中心部(体幹)から,力,速度などを順次加算,伝達させ,力の弱い末端部(手先,足先)のエネルギ,速度の増大を実現させています.本研究ではこのような人間のスマートな構造に注目しています.
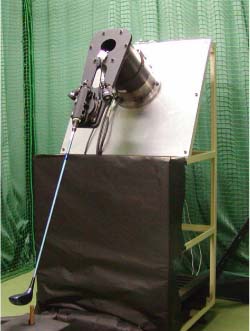
ゴルフスイングロボットの研究
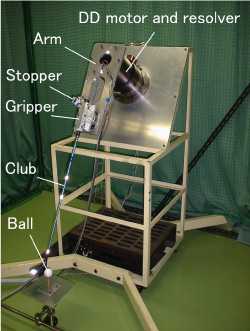
本研究では人間の行う高度な動作としてゴルフスイングを取り上げています.人間のスマートな構造とそれを生かす干渉駆動による多段加速を用いたゴルフスイングロボットの研究開発を行っています.
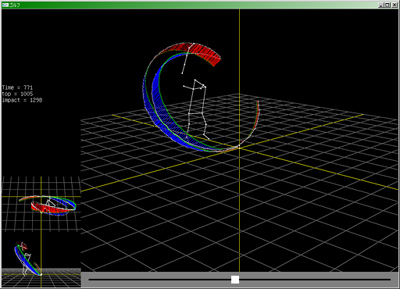
人間のゴルフスイング動作は足の動きによる重心のシフト,胴体,肩関節と手首関節の回転により実現される3次元動作ですが,本研究では問題を単純化して等価肩関節と手首関節により,スイング面と呼ばれる平面で行われる2次元動作とみなしています.
これまで,1号機・2号機の2台のゴルフスイングロボットの開発を行いました.手首関節にアクチュエータを持たない1号機ではヘッドスピード25m/s (男子プロの約半分のスピード)を,手首関節にアクチュエータを有する2号機では女子プロ並みのヘッドスピード40m/sを実現しています.現在,ニューラルネットワークを用いた学習制御や,関節ストッパを利用した運動軌道生成などの研究に取り組んでいます.
ゴルフスイングシステムの解析
ゴルフスイング動作は各関節の時間的・空間的な協調制御を中心に,多くの運動制御技能を必要とします.近年,ゴルフ産業界ではクラブフィッティング(プレーヤーに合ったゴルフクラブを選定すること)のニーズが大きくなっていますが,現状ではティーチングプロやクラフトマンの勘と経験に基づく評価に依存しています. そこで,本研究ではゴルフスイングを総合的に計測・解析することのできるシステムの開発を目的としています.これまでの研究成果としましては,本システムを用いて一般プレーヤーとプロゴルファーのスイングを計測し,システムの有効性を確認しました.