下条・明研究室
高速ロボットハンド
人間は手を使うことで高度な作業を行うことができます.ロボットにおいても,”手”すなわちロボットハンドによる作業の技能向上は重要な課題となっています.そのために,ロボットハンドの指先等に実装し,物体との接触情報を検出可能な触覚センサの実現が期待されています.
本研究室では,ロボットハンドの指先に装着可能な触覚センサを開発し,センサにより得られた触覚情報をフィードバックすることで,様々なハンドリング動作を実現することを目標に研究を行っています.
CoP触覚センサ
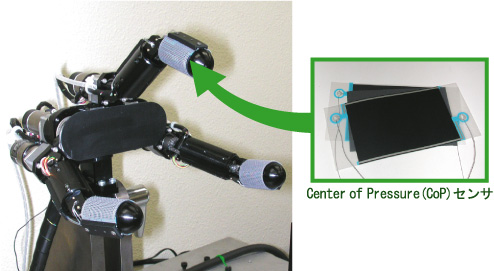
本研究室で開発した2次元荷重分布中心位置検出触覚センサ(Center of Pressure:CoPセンサ)は,その柔軟性を利用し曲面に装着することが可能です.また,配線が4本のみと省配線であり,ロボットハンドへの装着に適しています.本研究では,高速ロボットハンドの指先にCoPセンサを装着し,触覚情報を取得しています.
指先への衝突検知

CoPセンサは1ms以内の高速な応答性を有しています.この特徴を生かし,障害物の衝突を検知し,ハンドの制御にフィードバックさせる実験を行いました.衝突に対し非常に高速に反応しているため,衝突による衝撃は小さく抑えられています.
滑りの検出と把持力制御
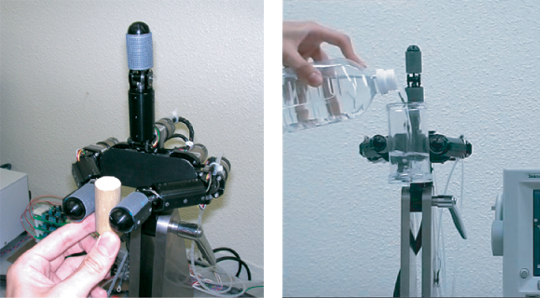
人間は感覚器で微小な滑りを検出することにより,必要最小限の力で器用に物体を把持していると考えられています.ロボットハンドでの把持においても,滑り検出は重要な課題であり,様々な滑り覚センサが提案されています.本研究ではCoP触覚センサを用いて滑りの発生する瞬間を検出するための方法について研究を行っています.また,センサにより得られた滑り情報をもとに,外から力を加えられても器用に物体を把持し続けるための制御方法についての研究を行っています.
さらに,これらの研究成果に基づき,人間のように様々な物体を即座に,しかも必要最小限の力で把持するための,把持力の調整方法について研究を行っています.
これからの研究の展開
ロボットハンドに触覚を持たせることにより,様々な作業への応用が期待されています.人間の手のような器用な作業の実現だけでなく,ロボットハンドの高速性と力強さを活かした,ハイパーヒューマンタスクの実現に向けて研究を行っています.