下条・明研究室
移動マニピュレータによる協調作業
人間は一人では出来ない事を,多くの人が集まりそれぞれの力を合わせ協調協力して作業にあたることで多くの問題を解決し作業の遂行にあたっています。また,人間同士だけでなく機械とも協調し、人間だけでは困難な作業をこなしています。このようなことはロボットにも言えることです。一台一台のロボットはそれぞれの能力が決まっているので、それ以上の仕事はできません。しかし、個々の能力が高いロボットが複数台で協調、協力して作業をすることで,より効果的で複雑・困難な作業を行わせることができるようになります。このような事から最近は複数台のロボットによる協調作業に関する研究が盛んになってきています。
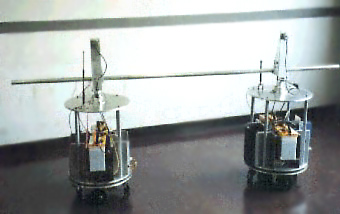
本研究室では、早くから二台の移動ロボットによる協調運搬作業に関する問題を取り上げて、移動ロボットによる長尺パイプの搬送作業を実現してきました。本研究では、これを発展して、2台の移動マニピュレータにより長尺パイプを取り外して、搬送し、取り付けるという一連の具体的作業の実現を目的としています。
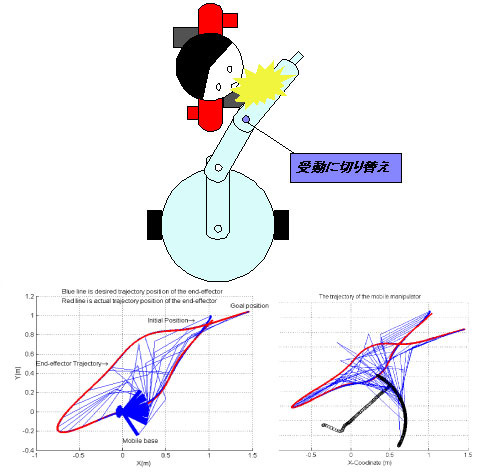
能動/受動切り替え関節を有した移動マニピュレータ
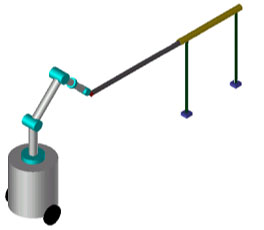
目的とする具体低作業を考慮した協調作業システムは、2台の移動マニピュレータにより構成され,各移動マニピュレータは,
- 独立2輪駆動非ホロノミック移動部
- 能動/受動切り替え関節を有した5自由度マニピュレータ
から構成されています.
複数台の移動ロボットあるいは移動マニピュレータの協調作業において問題になるのが,相対的な移動誤差によりシステム内に生じる過大な内力です.本研究室では,これまで行ってきたパイプの搬送システムの研究において,受動関節を用いるとシステム内に生じる過大な内力をうまく吸収でき,さらに受動関節の角度を監視し,必要に応じて移動ロボットの軌道修正制御へフィードバックすることで非常に簡単に搬送作業を実現できました.
一方で,取り付けや取り外しといった作業では,パイプをハンドリングするために必要十分な能動関節が必要となります.そこで,作業内容に応じて各関節を能動あるいは受動に切りかえることで,効率良く内力の吸収,移動誤差の修正を行おうと考え提案したものが「能動/受動切り替え関節」です.
現在,この「能動/受動切り替え関節」を採用した移動マニピュレータを試作し各種動作実験を行い,目的とする作業の実現へ向けて研究を進めています.これまでの研究で,パイプの取りつけ作業としてパイプホルダへパイプを挿入する作業を行い,パイプとパイプホルダの角度誤差に関係無く,パイプホルダにパイプが引っかかってさえいれば挿入が可能であることを実験で示しました.

同時駆動方式ソナーリングによる移動ロボットの高速障害物回避
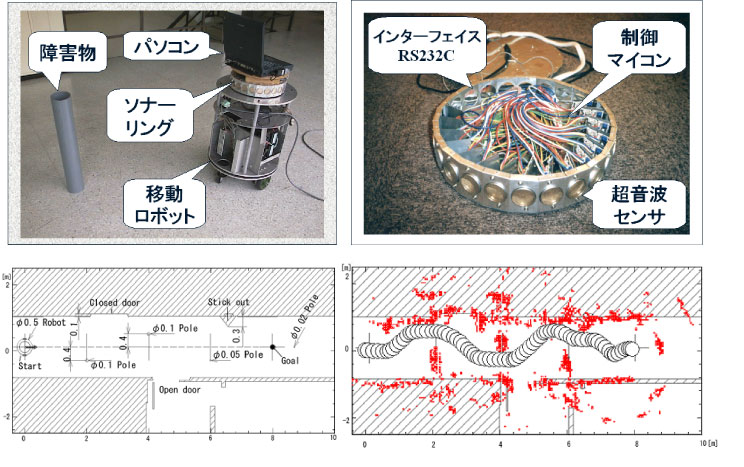
障害物回避の更なる高速化を図るために各超音波センサーに受信した最初の反射データのみ用います.これにより,クロストークの複雑な処理を避けて高速検出を可能にしました.また,ロボットの高速障害物回避の軌道生成に Dynamic Window Apprach (DWA) という新たな方法を適用し,高速センシング及び高速移動を可能にしました.
長いパイプの挿入作業
パイプの挿入制御アルゴリズムを確立し,パイプの挿入を実現しました.
部分的な拘束を受ける作業の応用 -曲面への描画作業-
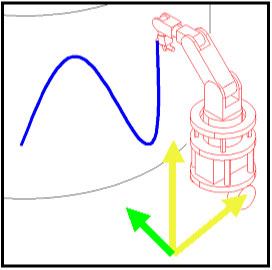
移動マニピュレータの能動/受動切り替え関節を生かし,第5関節をタッチセンサとして用いることで壁面との距離を推定し,垂直壁面(壁)への描画作業を実現しました.
スイッチングアプローチと衝突制御
人間とロボットの衝突において衝突力の軽減とエンドエフェクタの位置回復を実現する制御方法を提案し,その有用性を検証しました.
これからの研究の展開
ソナーリング,ステレオカメラとRFIDセンサを搭載し,センサフュージョンによる効率よくハンドリング対象物の認識とロボットのナビゲーションを行っていきます.
また,センサーフュージョンの結果に基づき,簡単なハンドでホームサービスにおける複雑なハンドリング方法の研究を行っていきます