下条・明研究室
スマートメカトロ機器
近年,センサ機能・アクチュエータ機能などを材料自体が併せ持つようないわゆるインテリジェント材料が様々な場面で注目されています.このようなインテリジェント材料として圧電繊維複合材料があります.本研究室では,圧電セラミック繊維を利用した新型圧電繊維複合材料であるMacro Fiber Composite(MFC)の優れた特徴に注目し,MFCを利用したスマートメカトロ機器の研究開発を行っています.
Macro Fiber Composite
MFCはNASAのラングレイ研究センターで開発された新しい圧電複合材料です.このMFCは従来の圧電材料に比べて構造的な特徴上柔らかく,衝撃に強いといった特徴を持っています.フィルム状のMFCに電圧を印加すると圧電繊維が伸縮し,歪みが発生してアクチュエータとして利用できます.外部から歪みを加えられると電圧が発生するので,センサとしても利用することができます.さらに,発電機能も期待されています.
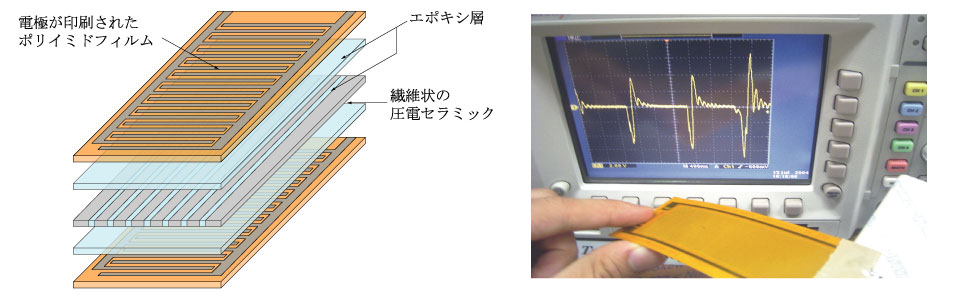
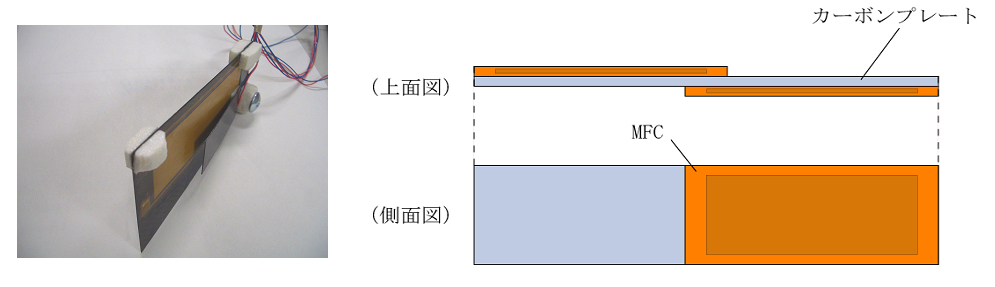
MFCの詳細構造(左図)とセンシング特性(右図)
本研究では,MFCの持つ構造的な材料特性より,MFCのセンサ及びアクチュエータとして利用することで,様々なメカトロ機器へ応用を目指しています.現在,MFCを用いた羽ばたきロボットや,水中ロボット,インテリジェントクッション,アクティブダンピングへの利用などについて検討を行っています.
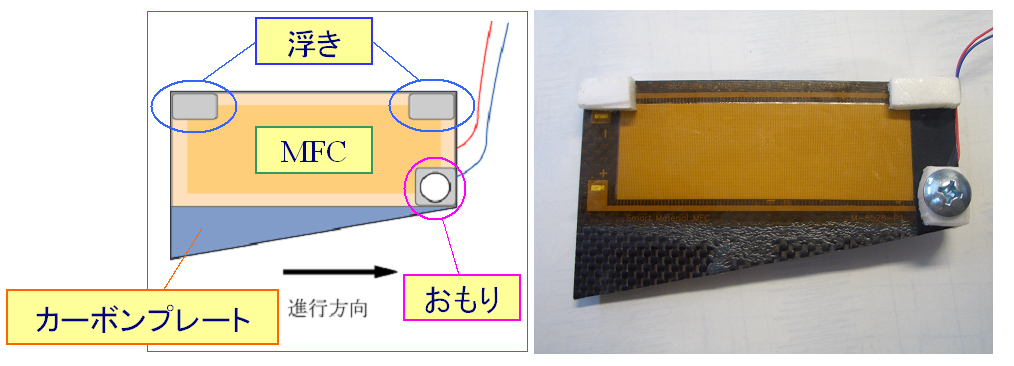
MFCを用いた飛翔体
3枚のMFCによるY字型翼
本研究室では圧電繊維複合材料を羽ばたきロボットの羽や尾翼等構造体の内部に収めることで,構造体自体をアクチュエーションに使用できるようにし,尾翼等の形状を変化させ,飛行が可能な新しい羽ばたき飛行ロボットの開発を目的としています.
現在,2タイプの翼の製作・検討を行い,共振駆動を利用した羽ばたき飛行体の設計,シミュレーションおよび試作を行い,飛行実現のための課題を検討しています.
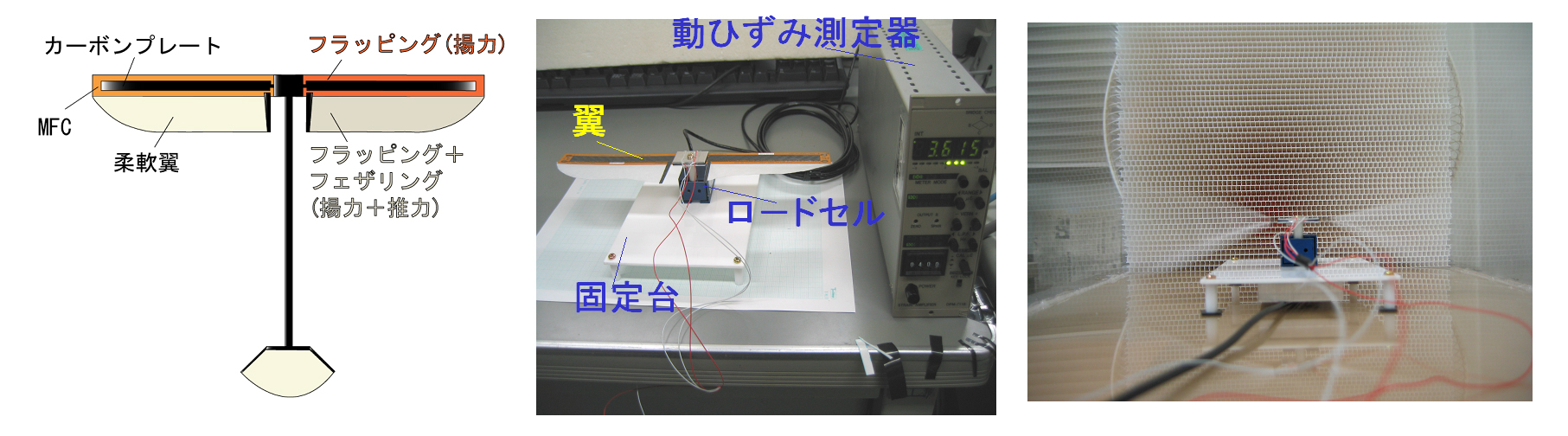
がんぴ紙を用いた柔軟翼
水中ロボットへの応用
1枚のMFCより製作された水中ロボット
複数枚のMFCより構成された旋回機構(左),方向切り替え機構(右)
本研究は,フィルム状で柔軟性のある新しい圧電繊維複合材料であるMFC(Macro Fiber Composite)を用いて水中生物の模倣した水中ロボットを開発することを目的とする.水中生物は,水中での高い運動性能を有するものが多く,魚類の運動機構を基に水中ロボットの設計を進める事は有効な方法であるといえる.この複雑な動きを実現するためには,魚類が持つ柔軟性を有する機構が必要であり,そのために従来のモーターなどとは異なる新しいアクチュエータの利用が考えられる.本研究では,魚類などのようにコンパクトで,素早く,効率よく動く水中ロボットの実現を目指して,MFCと貼り合わせる柔軟な構造物の設計と制御方法を研究しています.
インテリジェントクッション開発

インテリジェントクッション
MFC を利用した能動的にクッション制御が可能なインテリジェントシューズを開発することを目標として,その研究を行いました. 本研究室では,インテリジェントシューズに使われる能動型クッションのシミュレーションより機構設計及び試作を行い,MFC のセンシング,アクチュエーション機能を利用した衝撃吸収制御を実現しようと研究しています.