下条・明研究室
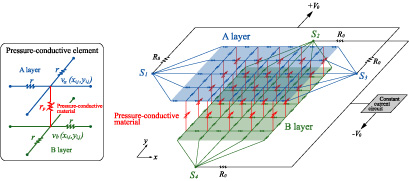
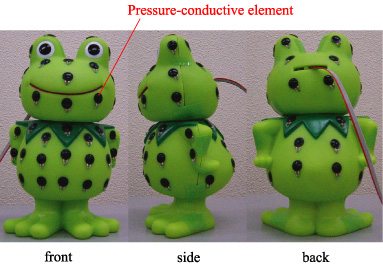
網目状触覚センサ
従来の触覚センサの解決すべき点として,自由曲面への装着,多数の配線処理といったことが挙げられます.網目状触覚センサはあらゆる自由曲面にネットを被せるように触覚センサを配置することが可能であり,配線はセンサ素子数によらず4本で済み,かつソフトウェアによる処理を必要としない高速な応答速度を持っています.そして2次元表面に加わる荷重分布の中心位置とその総荷重を検出することができます.
ロボットの全身被服
近年,ロボットの安全性向上や外界とのインターフェースとして,ロボットの全身に触覚を持たせるというニーズが高まっています.現在,本センサを用いた産業用ロボット等の全身被覆触覚の実現に向けて研究を行っています.