壓忦丒柧尋媶幒
怗妎僙儞僔儞僌
杮尋媶幒偱偼奜奅偐傜偺巋寖偲偟偰怗妎偵拲栚偟丆廮擃偱敄宆偺怗妎僙儞僒偺幚尰偲偦傟傪墳梡偟偨傾僾儕働乕僔儑儞偺奐敪偵岦偗偰尋媶偵庢傝慻傫偱偒傑偟偨丏偦偺惉壥偲偟偰丆2師尦壸廳暘晍偺拞怱埵抲傪専弌壜擻側怗妎僙儞僒偲丆壸廳暘晍偺寁應偑壜擻側崅枾搙宆怗妎僙儞僒偺2庬椶偺怗妎僙儞僒偺奐敪偵惉岟偟傑偟偨丏傑偨丆怗妎僙儞僒偵傛傝摼傜傟偨怗妎忣曬傪僱僢僩儚乕僋偱揱憲偟丆恖娫偺恄宱偵捈愙揱偊傞幚尡偵惉岟偟傑偟偨丏
怗妎恄宱僀儞僞乕僼僃乕僗
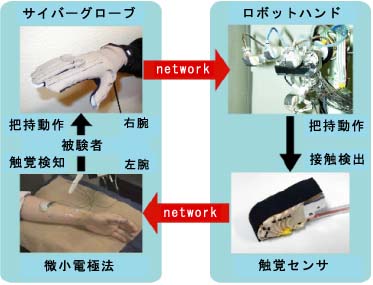
堛梡岺妛偺暘栰偱偼惗懱偺恄宱宯偲奜晹婡婍傪捈愙愙懕偡傞媄弍偑 拲栚偝傟偰偄傑偡丅杮尋媶偱偼墦妘憖嶌偝傟偨儘儃僢僩僴儞僪巜愭晹怗妎僙儞僒偐傜 弌椡傪憖嶌幰偺怗妎恄宱宯偵擖椡偡傞偙偲偱怗姶妎傪惂嵸偡傞僔僗僥儉傪 悽奅偱偼偠傔偰惉岟偟傑偟偨丏
暘晍宆怗妎僙儞僒
杮僙儞僒偼櫬宆僷僞乕儞偑儅僩儕僋僗忬偵攝抲偝傟偨僙儞僒揹嬌偲姶埑摫揹惈僑儉偐傜峔惉偝傟偰偄傑偡丏僙儞僒偺弌椡偼夞傝崬傒揹棳傪幷抐偡傞傾僫儘僌夞楬偵傛傝張棟偝傟丆AD曄姺偝傟偨屻PC偵庢傝崬傑傟傑偡丏
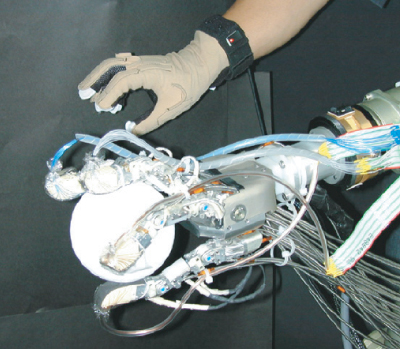
杮僙儞僒傪梡偄偰4杮巜儘儃僢僩僴儞僪偺巜晹傪惢嶌偟丆攃帩幚尡傪峴偄傑偟偨丏怗妎恄宱僀儞僞乕僼僃乕僗偺幚尡偵梡偄傜傟偰偄傞偺偑杮僙儞僒傪梡偄偰嶌傜傟偨怗妎僙儞僒晅偒儘儃僢僩僴儞僪偱偡丏
怗妎忣曬張棟梡LSI
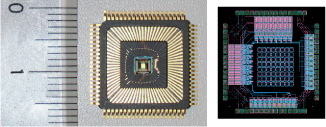
暘晍宆怗妎僙儞僒偱偼攝慄悢偑懡偔側傞偲偄偆栤戣揰偑偁傝傑偡丏偙傟偼儘儃僢僩傊偺幚憰偵偍偄偰戝偒側忈奞偲側傝傑偡丏偦偙偱丆杮尋媶幒偱偼丆僙儞僒偺嬤偔偵張棟夞楬傪攝抲偟丆徣攝慄壔傪幚尰偡傞偨傔偺怗妎忣曬張棟梡LSI偺奐敪傪峴偭偰偄傑偡丏偙偺傛偆側LSI偼撪晹偵傾僫儘僌夞楬偲僨傿僕僞儖夞楬傪帩偮偨傔儈僢僋僗僪僔僌僫儖LSI偲屇偽傟偰偄傑偡丏偙傟傑偱丆僙儞僒張棟夞楬傪峔惉偡傞夞楬梫慺偺LSI壔傪峴偄丆偦偺摦嶌傪妋擣偟偰偄傑偡丏傑偨丆嶐擭搙偵偼僙儞僒張棟夞楬傪LSI壔偟丆PC宱桼偱8亊8儅僩儕僋僗暘晍宆怗妎僙儞僒偐傜偺怗妎忣曬庢摼偵惉岟偟偰偄傑偡丏
帺桼嬋柺怗妎僙儞僒

巹払偺尋媶偺嵟戝偺栚揑偼丆恖娫偺旂晢偺傛偆偵儘儃僢僩偺慡恎偵旂晢姶妎傪梌偊傞偙偲偑偱偒傞怗妎僙儞僒傪奐敪偡傞偙偲偱偡丏偟偐偟丆儘儃僢僩偺昞柺偼暋嶨側嬋柺偺慻崌偣偱偱偒偰偄傞偺偱丆偦偺傛偆側怗妎僙儞僒偼偁傜備傞嬋柺偵宍惉偱偒側偗傟偽側傝傑偣傫丏
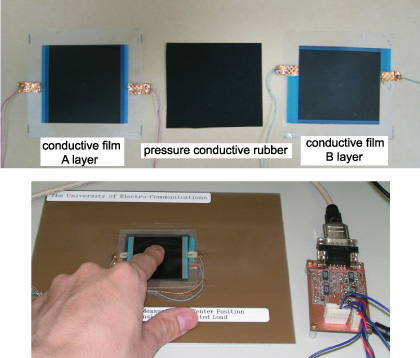
偦偙偱桳椡側岓曗偲側傞偺偑僨傿僢僺儞僌偵傛傞姶埑枌宍惉偲偄偆曽朄偱偡丏忋偺僀儊乕僕恾偺傛偆偵丆揹嬌傪暘晍偝偣偨儘儃僢僩僴儞僪傪塼忬偺姶埑摫揹惈僑儉偵怹偟偰丆庢傝弌偟偨屻僑儉傪峝壔偝偣偰姶埑枌傪宍惉偟傑偡丏偙偺曽朄側傜偽偳傫側暋嶨側宍忬偵傕懳墳偡傞偙偲偑偱偒傑偡丏杮尋媶幒偱偼忋偺幨恀偺傛偆偵媴柺偵幚嵺偵怗妎僙儞僒傪宍惉偟丆僙儞僒偑婡擻偡傞偙偲傪妋擣偟傑偟偨丏
壸廳暘晍拞怱埵抲専弌怗妎僙儞僒
杮尋媶幒偱偼丆敄宆丒廮擃丒寉検丒徣攝慄丒戝柺愊壔壜擻丒埨壙傪幚尰偟偨2師尦壸廳暘晍拞怱埵抲専弌怗妎僙儞僒傪奐敪偟傑偟偨丏杮僙儞僒偼1ms埲撪偲偄偆崅懍側墳摎懍搙偱僙儞僒偵壛偊傜傟傞壸廳暘晍偺拞怱埵抲偲偦偺憤壸廳傪寁應偡傞偙偲偑壜擻偱偡丏僙儞僒偺寁應尨棟傪惗偐偟偰丆僙儞僒張棟夞楬偼扨弮偱彫婯柾側夞楬偱幚尰偟偰偄傑偡丏
尰嵼丆杮僙儞僒偺摿惈夵慞偲偲傕偵丆僙儞僒傪墳梡偟偨條乆側傾僾儕働乕僔儑儞偺奐敪傪峴偭偰偄傑偡丏
2懌儘儃僢僩偺ZMP専弌
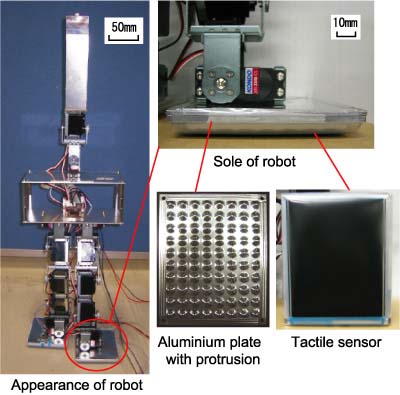
ZMP乮Zero Moment Point乯偲偼儘儃僢僩偵嶌梡偡傞廳椡丒姷惈椡丒彴斀椡偵傛傞儌乕儊儞僩偺憤榓偑0偲側傞揰偺偙偲傪偄偄傑偡丏ZMP偑懌棤偺愙抧巟帩懡妏宍撪偵偁傟偽丆儘儃僢僩偼埨掕偟偨曕峴傪峴偆偙偲偑偱偒傑偡丏
杮尋媶偱偼丆2懌曕峴儘儃僢僩偵懌棤偵壸廳暘晍拞怱埵抲専弌怗妎僙儞僒傪憰拝偟丆怴偨側ZMP専弌曽朄偲偟偰偺桳岠惈傪妋擣偟傑偟偨丏