![[PukiWiki]](image/comm.jpg "[Shimojo Laboratory]")
電気通信大学 下条研究室
Top/過去の研究/歩行アシスト
過去の研究/歩行アシストLast-modified: 2010-09-08 (水) 15:00:00
歩行アシストシステム近年,世界各国において高齢化社会が大きなテーマとなってきています.高齢化に伴い,筋力の低下などが原因で歩行機能に障害を持つ人々が増えてきています.このような歩行弱者に対し,自立して歩行動作を行うことを補助し,身体的・精神的負担を軽減するような歩行支援機への期待が高まっています. 本研究では,過労や怪我による筋力低下をアシストし,歩行動作の補助を行う体重支持型の歩行アシストシステムの開発を目的としています.   体重支持型アシストシステム本システムでは,健常な歩行動作に必要な要素として次の3つに注目しました.
このうち軌道とバランスは人の意思で行い,筋力のみをシステムにより補助することで随意性のある歩行動作に対し適切なアシストをすることを本システムの目標としています.特に,支持脚期の抗重力方向の筋力のみ補助を行い,遊脚期やバランス修正といった動作には全く関与しないことで,できる限り歩行動作の妨害とならない拘束感の低いシステムを目指しています.またこれにより関節などへの負担を軽減し,安全性の高いアシストシステムの実現を可能にします. 本システムでは,人間の動作意図を制御に反映させる方法として生体信号を利用します.生体信号をセンシングすることにより筋力や関節剛性の推定を行い,装着者の発揮している力に合わせたアシストを実現します.また,生体信号から装着者の次の動作を読み取ることにより適切なアシストの提供を実現します. Arm Assist Robot本研究では歩行アシストシステムの準備段階として,肘関節用のアシストシステムであるArm Assist Robot(AAR)の試作を行いました.AARシステムでは表面筋電位を制御に用いるシステムを構築し,関節トルクの推定とアシスト制御を行い,本システムがアシスト効果を発揮しつつ随意性を確保できていることを確認しました.  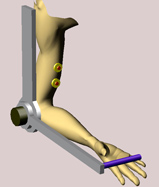 下肢関節用アシストシステム現在,Arm Assist Robotでの研究成果に基づき,下肢関節用のアシストシステムの試作を行い,アシスト方式の検討を進めています. 
|